Sitemap
A list of all the posts and pages found on the site. For you robots out there is an XML version available for digesting as well.
Pages
Posts
Future Blog Post
Published:
This post will show up by default. To disable scheduling of future posts, edit config.yml and set future: false.
Blog Post number 4
Published:
This is a sample blog post. Lorem ipsum I can’t remember the rest of lorem ipsum and don’t have an internet connection right now. Testing testing testing this blog post. Blog posts are cool.
Blog Post number 3
Published:
This is a sample blog post. Lorem ipsum I can’t remember the rest of lorem ipsum and don’t have an internet connection right now. Testing testing testing this blog post. Blog posts are cool.
Blog Post number 2
Published:
This is a sample blog post. Lorem ipsum I can’t remember the rest of lorem ipsum and don’t have an internet connection right now. Testing testing testing this blog post. Blog posts are cool.
Blog Post number 1
Published:
This is a sample blog post. Lorem ipsum I can’t remember the rest of lorem ipsum and don’t have an internet connection right now. Testing testing testing this blog post. Blog posts are cool.
activities
news
August 2020
Published:
Dr. Vesna Novak and I received the NSF National Robotics Initiative (NRI) grant.
December 2020
Published:
Chao Jiang presented the work “Multi-Robot Guided Policy Search for Learning Decentralized Swarm Control” in the 59th IEEE Conference on Decision and Control (CDC).
October 2021
Published:
Our paper titled “Automated patient-robot assignment for a robotic rehabilitation gym: a simplified simulation model.” has been accepted for publication in the Journal of NeuroEngineering and Rehabilitation.
December 2022
Published:
Chao Jiang is selected as Associate Editor of IEEE Robotics and Automation Magazine (RAM).
June 2023
Published:
Our paper titled “Incorporating Control Barrier Functions in Distributed Model Predictive Control for Multi-Robot Coordinated Control.” has been accepted for publication in IEEE Transactions on Control of Network Systems.
Published:
Our paper titled “End-to-end decentralized formation control using a graph neural network-based learning method.” has been accepted for publication in Frontiers in Robotics and AI.
October 2023
Published:
Our paper titled “Learning Skill Training Schedules from Domain Experts for a Multi-Patient Multi-Robot Rehabilitation Gym.” has been accepted for publication in IEEE Transactions on Neural Systems and Rehabilitation Engineering.
February 2024
Published:
Our paper titled “Distributed Sampling-Based Model Predictive Control via Belief Propagation for Multi-Robot Formation Navigation” has been accepted for publication in IEEE Robotics and Automation Letters.
July 2024
Published:
Ph.D. student, Umur Atan, presented our paper titled “Assistive Control of Robot Arms Via Adaptive Shared Autonomy” at the 2024 IEEE International Conference on Advanced Intelligent Mechatronics (AIM), Boston, USA.
September 2024
Published:
Ph.D. student, Varun Bharadwaj, presented our paper titled “Learning Skill Training Schedules from Domain Experts in a Rehabilitation Gym Using Inverse Reinforcement Learning” at the 2024 IEEE RAS/EMBS International Conference on Biomedical Robotics and Biomechatronics (BioRob).
March 2025
Published:
Congratulations to Ph.D. student, Varun Bharadwaj, on finishing 3rd in the College of Engineering and Physics Sciences Three-Minute Thesis Competition. He, among a few others, will move on to represent the College in the university-wide competition in the fall.
April 2025
Published:
Dr. Chao Jiang received the University of Wyoming Faculty Grant-In-Aid seed grant.
April 2025
Published:
Our paper titled “Dynamic Patient-Robot Assignment in a Simulated Stochastic Robotic Rehabilitation Gym” has been accepted for publication in IEEE Transactions on Medical Robotics and Bionics (T-MRB).
May 2025
Published:
Ph.D. student, Varun Bharadwaj, presented our paper titled “Preference Augmented Q-Learning for Patient Exercise Scheduling in a Robotic Rehabilitation Gym” at the 2025 IEEE International Conference on Rehabilitation Robotics (ICORR).
May 2025
Published:
Dr. Chao Jiang chaired the session “Reinforcement Learning III” at the 2025 International Conference on Robotics and Automation (ICRA).
July 2025
Published:
Our paper titled “A Probabilistic Inference Approach for Skill-Based Shared Autonomy in Assistive Robotic Manipulation” has been accepted for publication in IEEE Robotics and Automation Letters (RA-L).
August 2025
Published:
Chao Jiang serves as a workshop organizer for the 2025 NSF FRR-NRI annual meeting. See https://nrifrr-mtg25.org/.
September 2025
Published:
Chao Jiang recieved 2025 University of Wyoming Faculty Grand-in-Aid Seed Grand.
October 2025
Published:
Chao Jiang was invited to the panel discussion and gave a talk on Robotics Research in Wyoming at the 2025 NSF FRR-NRI annual meeting.
portfolio
Multi-Robot Coordinated Planning and Control
Multi-robot motion planning and control has been investigated for decades and is still an active research area due to the growing demand for both performance optimality and safety assurance. We developed learning-based methods and distributed model predictive control (DMPC) methods: 1) a gradient-based algorithm that leverages the alternating direction method of multipliers (ADMM) to decompose the team-level trajectory optimization into subproblems solved by individual robots. The algorithm also incorporates a discrete-time control barrier functions (CBF) as safety constraints to provide formal guarantee of collision avoidance; and 2) a sampling-based method that formulates multi-robot optimal control as probabilistic inference over graphical models and leverages belief propagation to achieve inference via distributed computation. We developed a distributed sampling-based model predictive control (MPC) algorithm based on the proposed framework, which obtains optimal controls via variational inference (VI).
NRI: FND: The Robotic Rehab Gym: Specialized Co-Robot Trainers Working with Multiple Human Trainees for Optimal Learning Outcomes, sponsored by NSF, 2020-2025
Overview: A robotic rehabilitation gym is defined as multiple patients training with multiple robots or passive sensorized devices in a group setting. Recent work with such gyms has shown positive rehabilitation outcomes; furthermore, such gyms allow a single therapist to supervise more than one patient, increasing cost-effectiveness. To allow more effective multipatient supervision in future robotic rehabilitation gyms, this project investigates automated systems that can dynamically assign patients to different robots within a session in order to optimize group rehabilitation outcome. 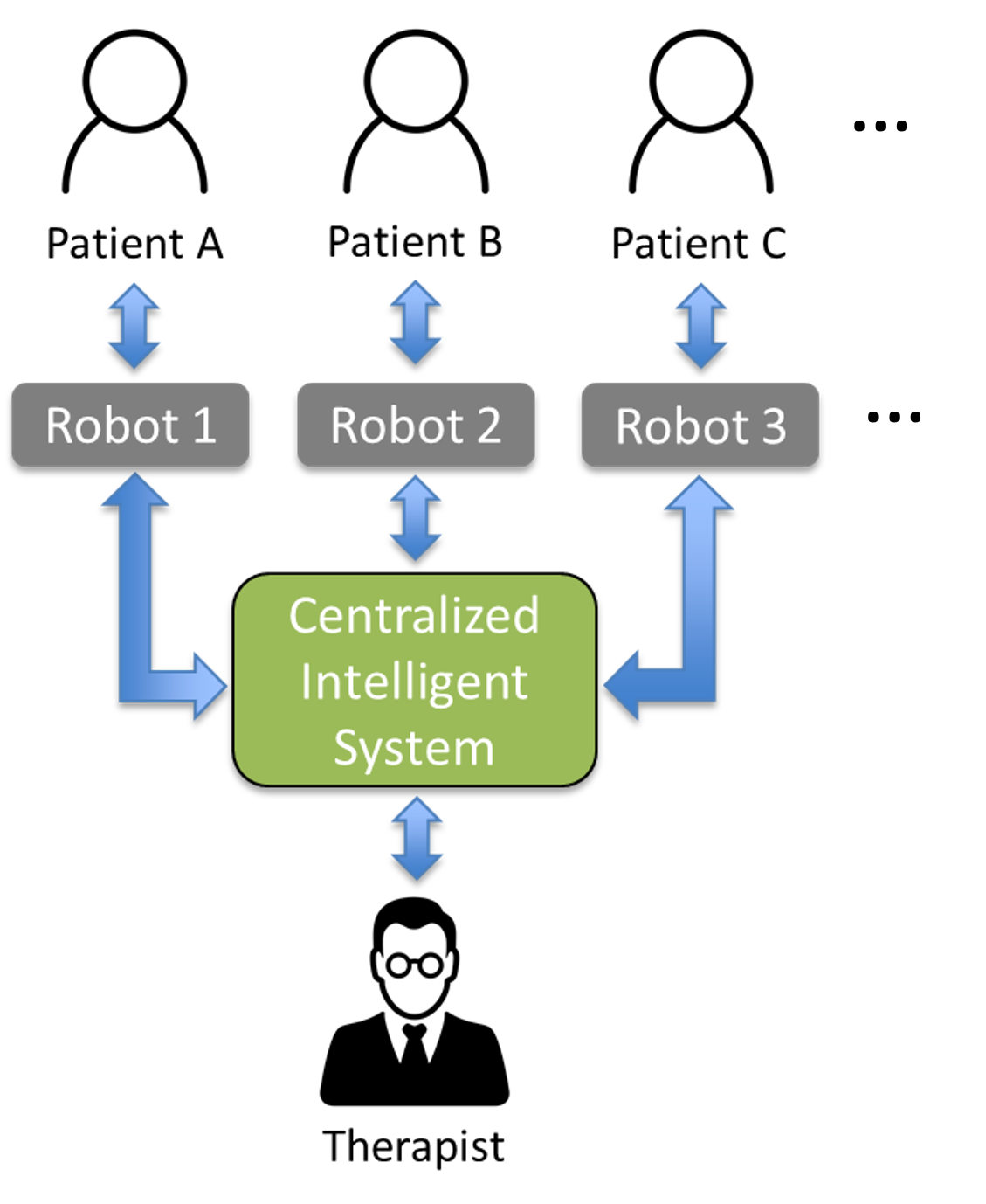
Adaptive Shared Autonomy for Assistive Robotic Manipulation
Overview: Shared autonomy promotes collaboration between humans and robots by integrating human input with autonomous control, allowing humans to perform tasks without the need for precise manual control. A primary problem in shared autonomy is how to determine the optimal balance of control between the user and robot. This problem is further complicated by the variability in human proficiency and preference when performing manipulation tasks. Addressing this issue requires systems to infer human skill levels, enabling dynamic adjustments to the level of assistance. Such adaptability ensures that assistance is neither overly intrusive for experienced users nor insufficient for novices. To address this challenge, this project investigates human-centric shared autonomy approaches that offers adaptive and personalized level of assistance. 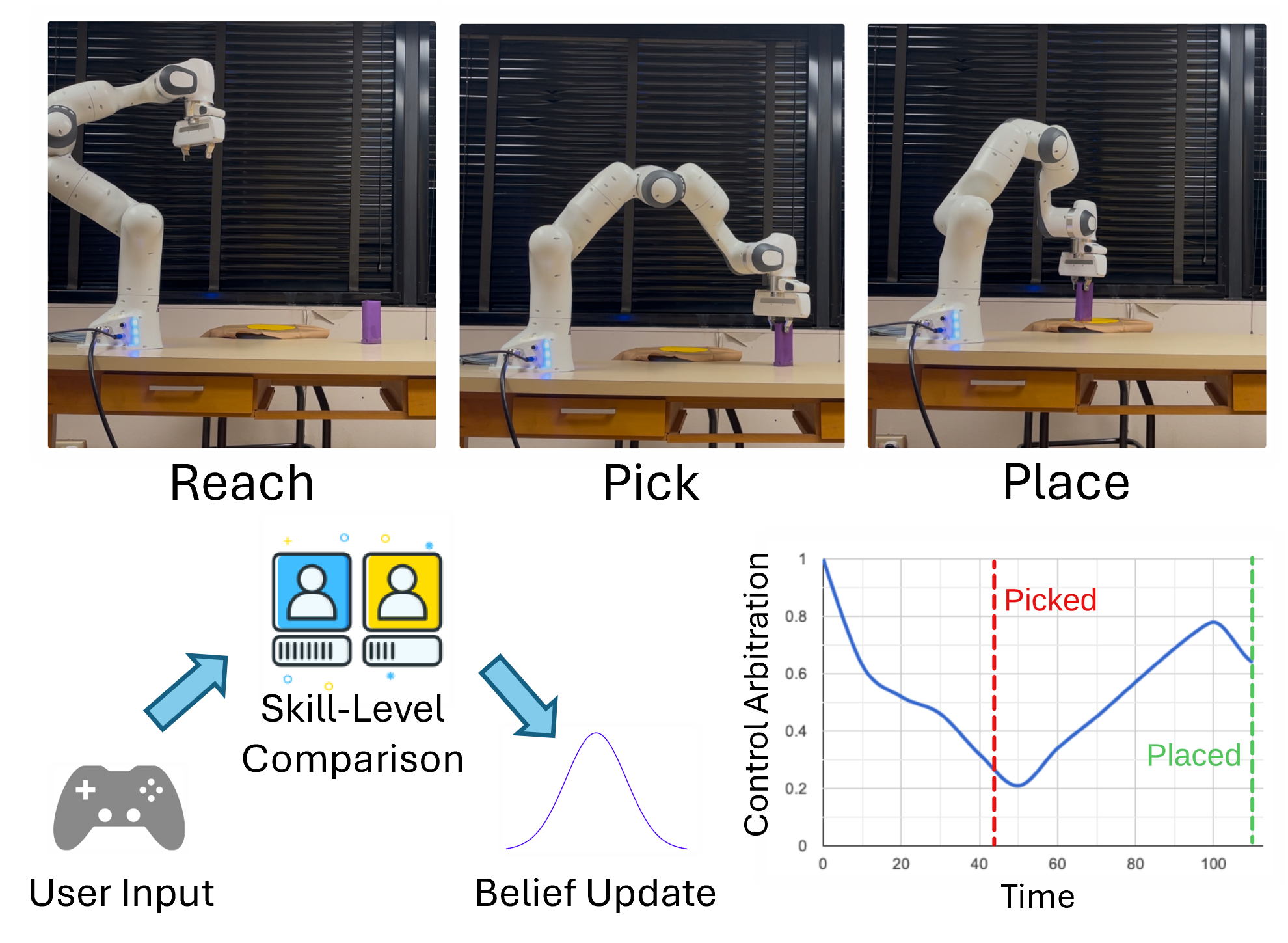
publications
Robot-assisted human indoor localization using the Kinect sensor and smartphones
Published in IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2014
Recommended citation: C. Jiang, M. Fahad, Y. Guo, J. Yang and Y. Chen. (2014). "Robot-assisted human indoor localization using the Kinect sensor and smartphones." IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). pp 4083-4089
Download Paper
Human Mobility Modeling for Robot-Assisted Evacuation in Complex Indoor Environments
Published in IEEE Transactions on Human-Machine Systems (T-HMS, IF: 4.4), 2016
Recommended citation: B. Tang, C. Jiang, H. He and Y. Guo. (2016). "Human Mobility Modeling for Robot-Assisted Evacuation in Complex Indoor Environments." IEEE Transactions on Human-Machine Systems. 46(5). pp 694-707
Download Paper
Probabilistic human mobility model in indoor environment
Published in International Joint Conference on Neural Networks (IJCNN), 2016
Recommended citation: B. Tang, C. Jiang, H. He and Y. Guo. (2016). "Probabilistic human mobility model in indoor environment." International Joint Conference on Neural Networks (IJCNN). pp 1601-1608
Download Paper
Robot-assisted pedestrian regulation in an exit corridor
Published in IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2016
Recommended citation: C. Jiang, Z. Ni, Y. Guo and H. He. (2016). "Robot-assisted pedestrian regulation in an exit corridor." IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). pp 815-822
Download Paper
Learning Human–Robot Interaction for Robot-Assisted Pedestrian Flow Optimization
Published in IEEE Transactions on Systems, Man, and Cybernetics: Systems (T-SMC, IF: 8.7), 2017
Recommended citation: C. Jiang, Z. Ni, Y. Guo and H. He. (2017). "Learning Human–Robot Interaction for Robot-Assisted Pedestrian Flow Optimization." IEEE Transactions on Systems, Man, and Cybernetics: Systems. 49(4). pp 797-813
Download Paper
A Modified PSO Algorithm for Parameters Identification of the Double-Dispersion Cole Model
Published in Journal of Circuits, Systems and Computers, 2018
Recommended citation: L. Liu, L. Shan, C. Jiang, Y. Dai, C. Liu, and Z. Qi. (2018). "A Modified PSO Algorithm for Parameters Identification of the Double-Dispersion Cole Model." Journal of Circuits, Systems and Computers. 50(4). pp 1669-1682.
Download Paper
Robot-assisted pedestrian flow control of a controlled pedestrian corridor
Published in International Journal of Advanced Robotic Systems (IF: 2.1), 2018
Recommended citation: L. Shan, L, Chang, Siyuan Xu, C. Jiang and Y. Guo. (2018). "Robot-assisted pedestrian flow control of a controlled pedestrian corridor." International Journal of Advanced Robotic Systems. 15(6).
Download Paper
Robot-assisted smartphone localization for human indoor tracking
Published in Robotics and Autonomous Systems (IF: 5.2), 2018
Recommended citation: C. Jiang, M. Fahad, Y. Guo and Y. Chen. (2018). "Robot-assisted smartphone localization for human indoor tracking." Robotics and Autonomous Systems. 106. pp 82-94.
Download Paper
Pedestrian-Robot Interaction Experiments in an Exit Corridor
Published in International Conference on Ubiquitous Robots (UR), 2018
Recommended citation: Z. Chen, C. Jiang and Y. Guo. (2018). "Pedestrian-Robot Interaction Experiments in an Exit Corridor." International Conference on Ubiquitous Robots (UR). pp 26-30.
Download Paper
Robot-Assisted Pedestrian Regulation Based on Deep Reinforcement Learning
Published in IEEE Transactions on Cybernetics (T-CYB, IF: 10.5), 2018
Recommended citation: Z. Wan, C. Jiang, M. Fahad, Z. Ni, H. He and Y. Guo. (2018). "Robot-Assisted Pedestrian Regulation Based on Deep Reinforcement Learning." IEEE Transactions on Cybernetics. 50(4). pp 1669-1682.
Download Paper
Optimization of Merging Pedestrian Flows Based on Adaptive Dynamic Programming
Published in American Control Conference (ACC), 2019
Recommended citation: C. Jiang, Z. Ni, Y. Guo and H. He. (2019). "Optimization of Merging Pedestrian Flows Based on Adaptive Dynamic Programming." American Control Conference (ACC). pp 2626-2632.
Download Paper
Distance-based Formation Control of a Three-Robot System
Published in Chinese Control And Decision Conference (CCDC), 2019
Recommended citation: Z. Chen, C. Jiang and Y. Guo (2019). "Distance-based Formation Control of a Three-Robot System." Chinese Control And Decision Conference (CCDC). pp 5574-5580.
Download Paper
Learning Decentralized Control Policies for Multi-Robot Formation
Published in IEEE/ASME International Conference on Advanced Intelligent Mechatronics (AIM), 2019
Recommended citation: C. Jiang, Z. Chen and Y. Guo (2019). "Learning Decentralized Control Policies for Multi-Robot Formation." IEEE/ASME International Conference on Advanced Intelligent Mechatronics (AIM). pp 758-765.
Download Paper
Pedestrian Flow Optimization to Reduce the Risk of Crowd Disasters Through Human–Robot Interaction
Published in IEEE Transactions on Emerging Topics in Computational Intelligence (T-ETCI, IF: 6.5), 2019
Recommended citation: C. Jiang, Z. Ni, Y. Guo and H. He. (2020). "Pedestrian Flow Optimization to Reduce the Risk of Crowd Disasters Through Human–Robot Interaction." IEEE Transactions on Emerging Topics in Computational Intelligence. 4(3). pp 298-311.
Download Paper
Multi-robot formation control: a comparison between model-based and learning-based methods
Published in Journal of Control and Decision (IF: 1.8), 2019
Recommended citation: C. Jiang, Y. Guo. (2020). "Multi-robot formation control: a comparison between model-based and learning-based methods." Journal of Control and Decision. 7(1). pp 90-108.
Download Paper
Multi-robot guided policy search for learning decentralized swarm control
Published in IEEE Control Systems Letters (L-CSS, IF: 2.0), 2020
Recommended citation: C. Jiang, Y. Guo. (2021). "Multi-robot guided policy search for learning decentralized swarm control." IEEE Control Systems Letters (L-CSS). 5(3). pp 743-748.
Download Paper
Reinforcement based mobile robot path planning with improved dynamic window approach in unknown environment
Published in Autonomous Robots (IF: 4.3), 2021
Recommended citation: L. Chang, L. Shan, C. Jiang and Y. Dai. (2021). "Reinforcement based mobile robot path planning with improved dynamic window approach in unknown environment." Autonomous Robots. 45. pp 51-76.
Download Paper
Learning Dynamic Patient-Robot Task Assignment and Scheduling for A Robotic Rehabilitation Gym
Published in IEEE International Conference on Rehabilitation Robotics (ICORR), 2022
Recommended citation: B. Adhikari, S. Ranashing , B.A. Miller, V.D. Novak and C. Jiang. (2022). "Learning Dynamic Patient-Robot Task Assignment and Scheduling for A Robotic Rehabilitation Gym." IEEE International Conference on Rehabilitation Robotics (ICORR). pp 1-6.
Download Paper
Automated patient-robot assignment for a robotic rehabilitation gym: a simplified simulation model
Published in Journal of NeuroEngineering and Rehabilitation (JNER, IF: 5.2), 2022
Recommended citation: B.A. Miller, B. Adhikari, C. Jiang and V.D. Novak. (2022). "Automated patient-robot assignment for a robotic rehabilitation gym: a simplified simulation model." Journal of NeuroEngineering and Rehabilitation (JNER). 19(1). p 126.
Download Paper
Incorporating Control Barrier Functions in Distributed Model Predictive Control for Multi-Robot Coordinated Control
Published in IEEE Transactions on Control of Network Systems (T-CNS, IF: 5.0), 2023
Recommended citation: C. Jiang, Y. Guo. (2024). "Incorporating Control Barrier Functions in Distributed Model Predictive Control for Multi-Robot Coordinated Control." IEEE Transactions on Control of Network Systems. 11(1). pp 547-557.
Download Paper
Learning Skill Training Schedules from Domain Experts for a Multi-Patient Multi-Robot Rehabilitation Gym
Published in IEEE Transactions on Neural Systems & Rehabilitation Engineering (T-NSRE, IF: 5.2), 2023
Recommended citation: B. Adhikari, V.R. Bharadwaj, B.A. Miller, V.D. Novak and C. Jiang. (2023). "Learning Skill Training Schedules from Domain Experts for a Multi-Patient Multi-Robot Rehabilitation Gym." IEEE Transactions on Neural Systems & Rehabilitation Engineering (T-NSRE). 31. pp 4256-4265.
Download Paper
End-to-End Decentralized Formation Control Using Graph Neural Network Based Learning Method
Published in Frontiers in Robotics and AI (IF: 3.0), 2023
Recommended citation: C. Jiang, Y. Guo. (2023). "End-to-End Decentralized Formation Control Using Graph Neural Network Based Learning Method." Frontiers in Robotics and AI. 10. p 1285412.
Download Paper
Automated Patient-Robot Task Assignment in a Simulated Stochastic Rehabilitation Gym
Published in IEEE International Conference on Rehabilitation Robotics (ICORR), 2023
Recommended citation: B.A. Miller, B. Adhikari, C. Jiang and V.D. Novak. (2023). "Automated Patient-Robot Task Assignment in a Simulated Stochastic Rehabilitation Gym." IEEE International Conference on Rehabilitation Robotics (ICORR).
Download Paper
Distributed Sampling-Based Model Predictive Control via Belief Propagation for Multi-Robot Formation Navigation
Published in IEEE Robotics and Automation Letters (RA-L, IF: 5.3), 2024
Recommended citation: C. Jiang. (2024). "Distributed Sampling-Based Model Predictive Control via Belief Propagation for Multi-Robot Formation Navigation." IEEE Robotics and Automation Letters. 9(4). pp 308–311.
Download Paper
Assistive Control of Robot Arms via Adaptive Shared Autonomy
Published in IEEE/ASME International Conference on Advanced Intelligent Mechatronics (AIM), 2024
Recommended citation: U. Atan, V.R. Bharadwaj and C. Jiang. (2024). "Assistive Control of Robot Arms via Adaptive Shared Autonomy." IEEE/ASME International Conference on Advanced Intelligent Mechatronics (AIM). pp. 1096-1102.
Download Paper
Learning Skill Training Schedules from Domain Experts in a Rehabilitation Gym using Inverse Reinforcement Learning
Published in IEEE RAS/EMBS International Conference on Biomedical Robotics and Biomechatronics (BioRob), 2024
Recommended citation: V.R. Bharadwaj, B.A. Miller, V.D. Novak and C. Jiang. (2024). "Learning Skill Training Schedules from Domain Experts in a Rehabilitation Gym using Inverse Reinforcement Learning." IEEE RAS/EMBS International Conference on Biomedical Robotics and Biomechatronics (BioRob). pp. 1815-1821.
Download Paper
Preference Augmented Q-Learning for Patient Exercise Scheduling in a Robotic Rehabilitation Gym
Published in IEEE International Conference on Rehabilitation Robotics (ICORR), 2025
Recommended citation: V.R. Bharadwaj, B.A. Miller, V.D. Novak and C. Jiang. (2025). "Preference Augmented Q-Learning for Patient Exercise Scheduling in a Robotic Rehabilitation Gym." IEEE International Conference on Rehabilitation Robotics (ICORR). DOI: 10.1109/ICORR66766.2025.11063100.
Download Paper
The Robotic Rehabilitation Gym: From Simulation to Real-World Studies
Published in International Conference on Neurorehabilitation (ICNR), 2025
Recommended citation: V.D. Novak, V.R. Bharadwaj, B.A. Miller and C. Jiang. (2025). "The Robotic Rehabilitation Gym: From Simulation to Real-World Studies." International Conference on Neurorehabilitation (ICNR). pp 308–311.
Download Paper
Dynamic Patient-Robot Assignment in a Simulated Stochastic Robotic Rehabilitation Gym
Published in IEEE Transactions on Medical Robotics and Bionics (T-MRB, IF: 3.8), 2025
Recommended citation: B.A. Miller, V.R. Bharadwaj, C. Jiang, and V.D. Novak. (2025). "Dynamic Patient-Robot Assignment in a Simulated Stochastic Robotic Rehabilitation Gym." IEEE Transactions on Medical Robotics and Bionics. DOI: 10.1109/TMRB.2025.3573025.
Download Paper
A LiDAR and reasoning-based artificial potential field for mobile robot navigation in unknown and dynamic environments
Published in Advanced Engineering Informatics (IF: 9.9), 2025
Recommended citation: L. Chang, L. Shan, W. Zhang, C. Jiang, W. Wang and Y. Dai. (2025). "A LiDAR and reasoning-based artificial potential field for mobile robot navigation in unknown and dynamic environments.." Advanced Engineering Informatics. 67 (2025): 103519.
Download Paper
A Probabilistic Inference Approach for Skill-Based Shared Autonomy in Assistive Robotic Manipulation
Published in IEEE Robotics and Automation Letters (RA-L, IF: 5.3), 2025
Recommended citation: U. Atan, V.R. Bharadwaj and C. Jiang. (2025). "A Probabilistic Inference Approach for Skill-Based Shared Autonomy in Assistive Robotic Manipulation." IEEE Robotics and Automation Letters. 10(9). pp 9518-9525.
Download Paper
research
Indoor Human Localization: A cooperative localization scheme using robot-smartphone collaboration (past project)
Overview: Smartphone-based human indoor localization was previously implemented using wireless sensor networks at the cost of sensing infrastructure deployment. Motivated by the increasing research attention on location-aware human-robot interaction, this project studies a robot-assisted human indoor localization scheme using acoustic ranging between a self-localized mobile robot and smartphones from human users. Data from the low-cost Kinect vision sensor are fused with smartphone-based acoustic ranging, and an extended Kalman filter based localization algorithm is developed for real-time dynamic position estimation and tracking. Real robot-smartphone experiments are performed, and performances are evaluated in various indoor environments under different environmental noises and with different human walking speed. Compared with existing indoor smartphone localization methods, the proposed system does not rely on wireless sensing infrastructure, and has comparable localization accuracy with increased flexibility and scalability due to the mobility of the robot. 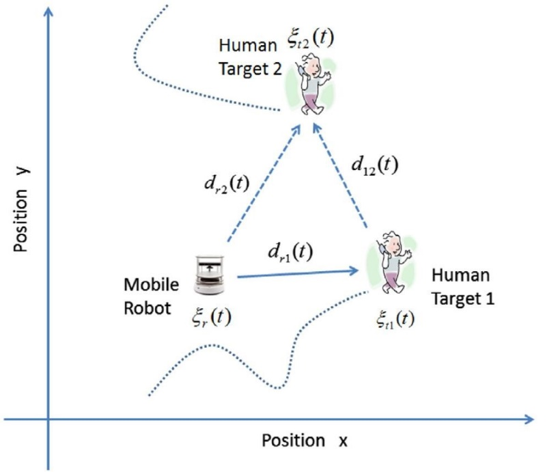
Robot-Assisted Pedestrian Regulation: Learning optimal human-robot interaction (past project)
Overview: This project investigates an emerging application of assistive robots in pedestrian regulation. We propose a novel robot-assisted pedestrian regulation framework that utilizes the dynamic pedestrian-robot interaction during their collective movements. The insights of the effect of pedestrian-robot interaction on the pedestrian movements and the optimal robot motion for desired pedestrian regulation objectives are provided. Adaptive dynamic programming (ADP) algorithm and deep reinforcement learning algorithms are designed to learn optimal control of robot motion. The proposed adaptive learning framework is applied to a merging flow scenarios to reduce the risk of crowd disasters. Furthermore, to address the challenge of feature representation of complex human motion dynamics under the effect of HRI, an end-to-end robot motion planner based on deep neural network is proposed and trained using a deep reinforcement learning algorithm. The new approach avoids hand-crafted feature detection and extraction and thus improves the learning capability for complex dynamic problems.
Multi-Robot Coordinated Planning and Control
Overview: Multi-robot motion planning and control has been investigated for decades and is still an active research area due to the growing demand for both performance optimality and safety assurance. We developed learning-based methods and distributed model predictive control (DMPC) methods: 1) a gradient-based algorithm that leverages the alternating direction method of multipliers (ADMM) to decompose the team-level trajectory optimization into subproblems solved by individual robots. The algorithm also incorporates a discrete-time control barrier functions (CBF) as safety constraints to provide formal guarantee of collision avoidance; and 2) a sampling-based method that formulates multi-robot optimal control as probabilistic inference over graphical models and leverages belief propagation to achieve inference via distributed computation. We developed a distributed sampling-based model predictive control (MPC) algorithm based on the proposed framework, which obtains optimal controls via variational inference (VI).
Adaptive Shared Autonomy for Assistive Robotic Manipulation
Overview: Shared autonomy promotes collaboration between humans and robots by integrating human input with autonomous control, allowing humans to perform tasks without the need for precise manual control. A primary problem in shared autonomy is how to determine the optimal balance of control between the user and robot. This problem is further complicated by the variability in human proficiency and preference when performing manipulation tasks. Addressing this issue requires systems to infer human skill levels, enabling dynamic adjustments to the level of assistance. Such adaptability ensures that assistance is neither overly intrusive for experienced users nor insufficient for novices. To address this challenge, this project investigates human-centric shared autonomy approaches that offers adaptive and personalized level of assistance.
NRI: FND: The Robotic Rehab Gym: Specialized Co-Robot Trainers Working with Multiple Human Trainees for Optimal Learning Outcomes, sponsored by NSF
Overview: A robotic rehabilitation gym is defined as multiple patients training with multiple robots or passive sensorized devices in a group setting. Recent work with such gyms has shown positive rehabilitation outcomes; furthermore, such gyms allow a single therapist to supervise more than one patient, increasing cost-effectiveness. To allow more effective multipatient supervision in future robotic rehabilitation gyms, this project investigates automated systems that can dynamically assign patients to different robots within a session in order to optimize group rehabilitation outcome.
talks
Robot-Assisted Pedestrian Flow Regulation
Published:
teaching
EE4800 Autonomous Cyber-Physical Systems
Undergraduate course, University of Wyoming, Department of Electrical Engineering and Computer Science, 2024
Spring 2020-2021, 2023, Fall 2024
EE2390 Digital Systems Design
Undergraduate course, University of Wyoming, Department of Electrical Engineering and Computer Science, 2025
Fall 2019, Spring 2020, Spring 2022-2025
EE5885 Deep Reinforcement Learning and Control
Graduate course, University of Wyoming, Department of Electrical Engineering and Computer Science, 2025
Fall 2020-2022, Spring 2024-2025
EE4490 Hardware Description Language (HDL) Digital Design
Undergraduate course, University of Wyoming, Department of Electrical Engineering and Computer Science, 2025
Fall 2020-2022, 2024-2025