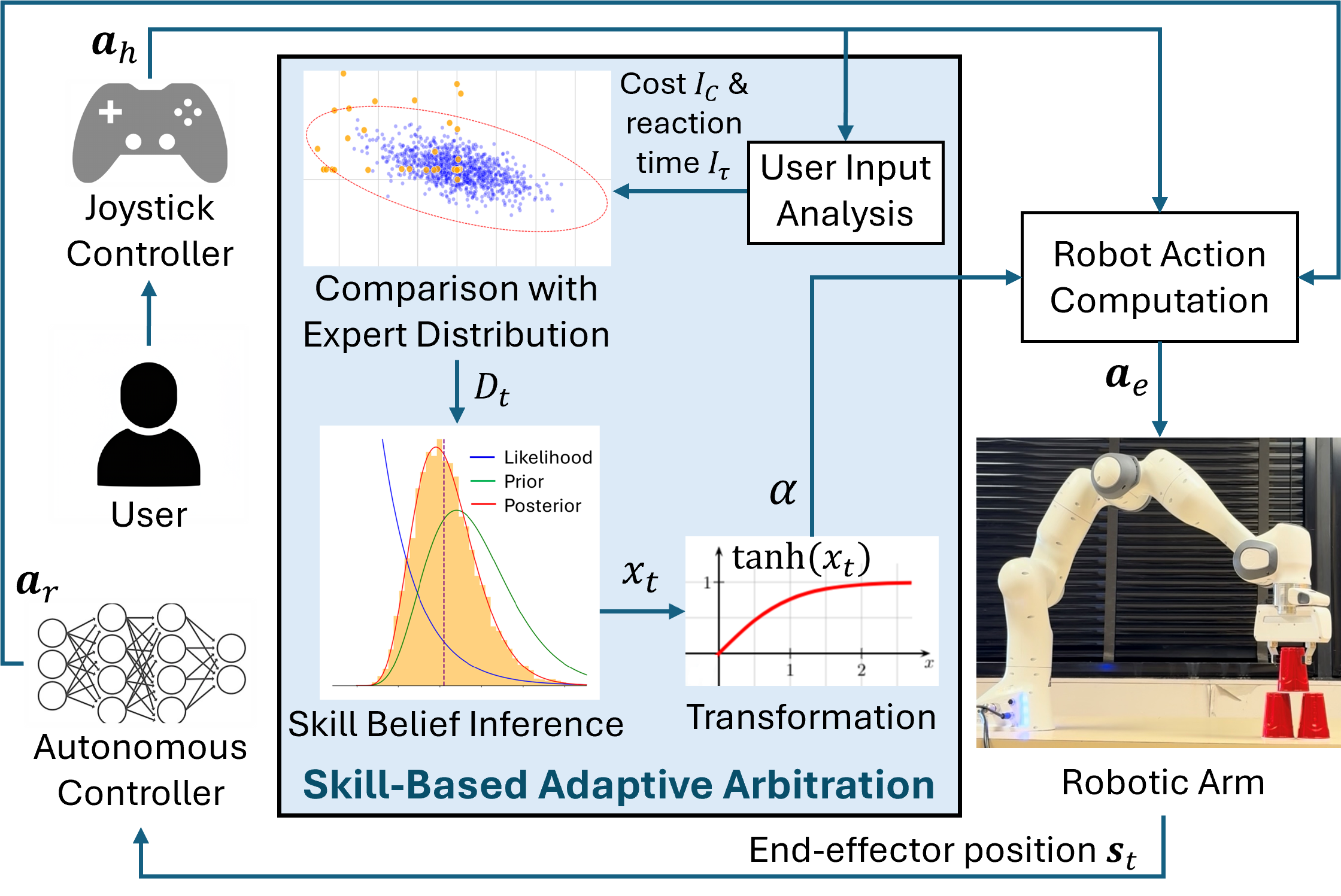
Adaptive Shared Autonomy for Assistive Robotic Manipulation
Assistive Robotic Manipulation1. Skill-Based Adaptive Shared Autonomy
Publications:
- [2] Atan, U., Bharadwaj, V.R. and Jiang, C. (2025). A probabilistic Inference Approach for Skill-Based Shared Autonomy in Assistive Robotic Manipulation. IEEE Robotics and Automation Letters (RA-L), 2025
- [1] Atan, U., Bharadwaj, V.R. and Jiang, C. (2024). Assistive Control of Robot Arms via Adaptive Shared Autonomy. In 2024 IEEE International Conference on Advanced Intelligent Mechatronics (AIM), pp. 1096-1102