1. Multi-Robot Trajectory Optimization via Model Predictive Control
Distributed Variational Inference MPC for Multi-Robot Navigation [5]
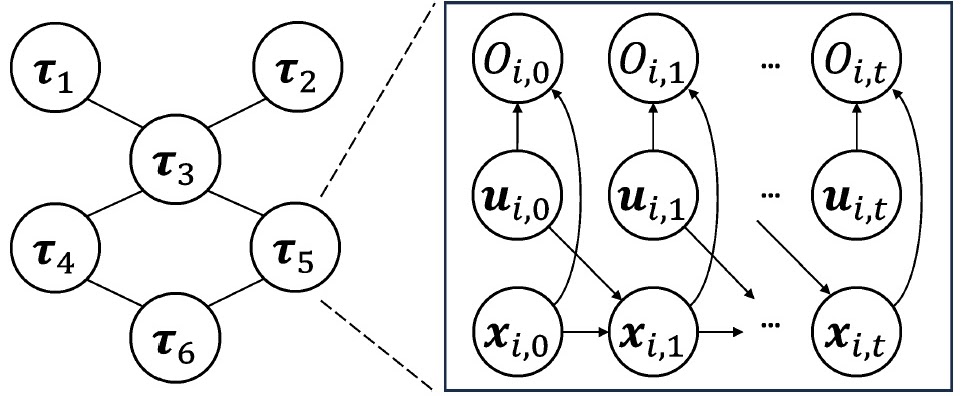
A multi-robot team represented as a Markov random field.
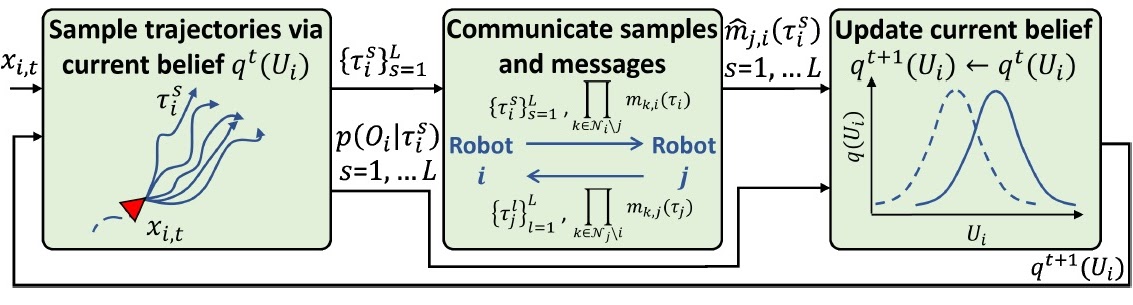
An overview of the distributed VI-MPC algorithm.
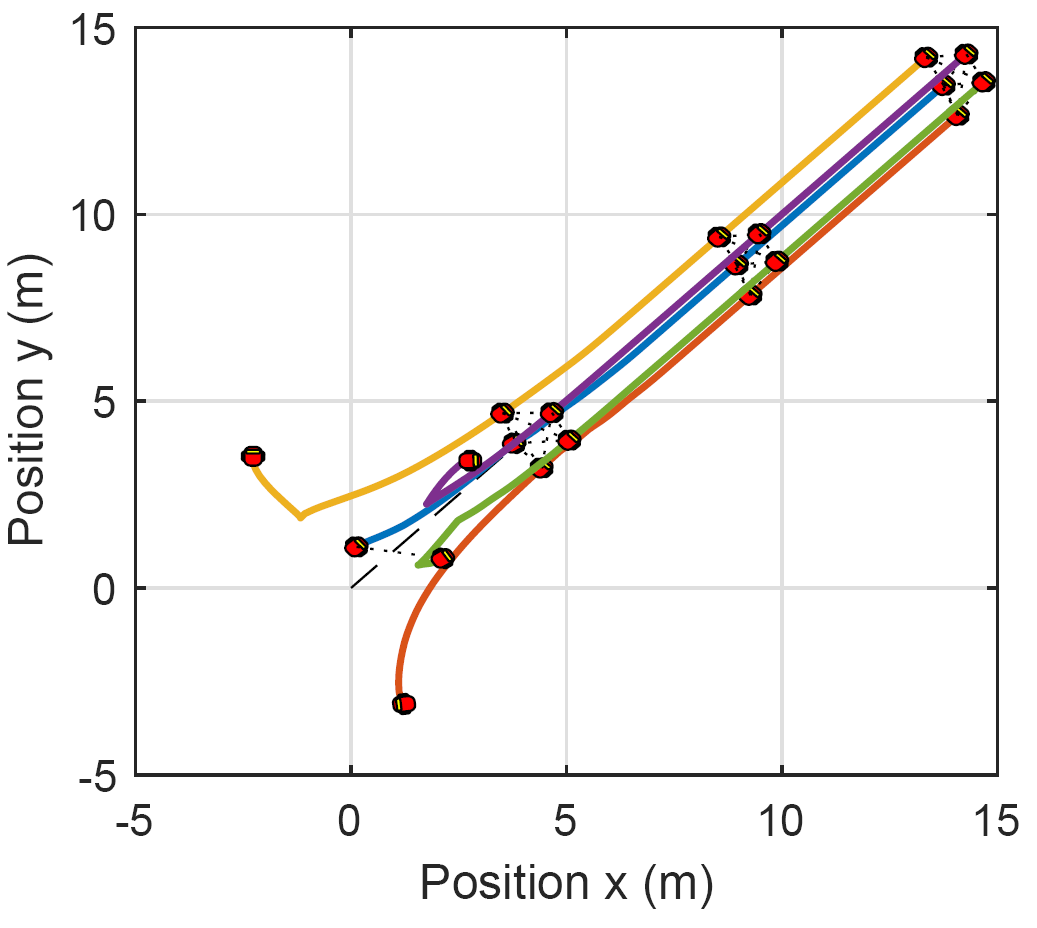
Demonstration of distributed sampling-based MPC for multi-robot formation navigation.
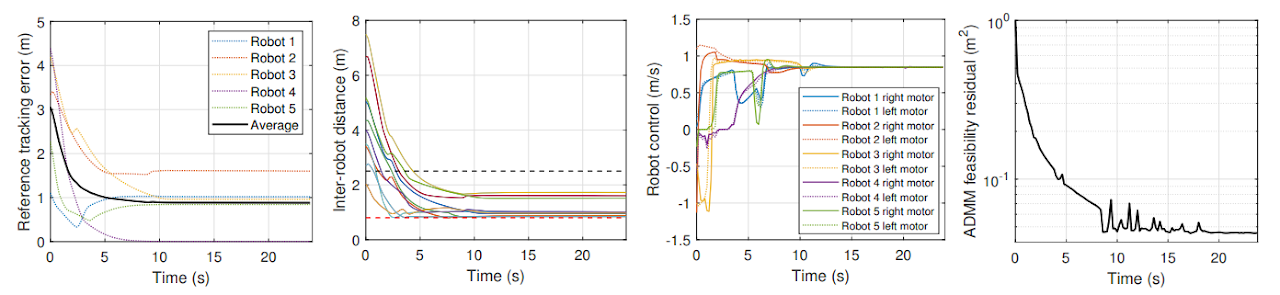
Incorporating Control Barrier Functions in Distributed MPC [4]
Trajecotries of multi-robot formation navigation.
Results of DMPC for multi-robot coordinated control with CBF safety.
2. Learning-Enabled Multi-Robot Formation
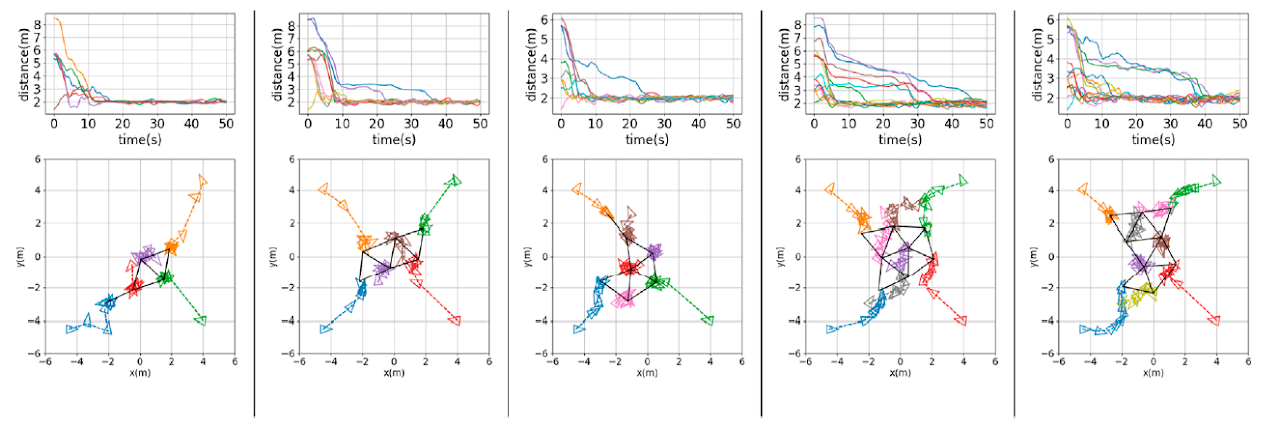
Triangulation formation using a GNN-based policy (9 robots). [3]
Triangulation formation using GNN-based policies for different robot team sizes. [3]
Demonstration of multi-roboat triangulation formation using GNN-based policies [3].
Publications:
[5] Jiang, C. (2024). Distributed Sampling-Based Model Predictive Control via Belief Propagation for Multi-Robot Formation Navigation. IEEE Robotics and Automation Letters (RA-L), vol. 9, no. 4, pp. 3467-3474. DOI: 10.1109/LRA.2024.3368794.
[4] Jiang, C., & Guo, Y. (2023). Incorporating Control Barrier Functions in Distributed Model Predictive Control for Multi-Robot Coordinated Control. IEEE Transactions on Control of Network Systems (T-CNS). DOI: 10.1109/TCNS.2023.3290430.
[3] Jiang, C., Huang, X., & Guo, Y. (2023). End-to-End Decentralized Formation Control Using Graph Neural Network Based Learning Method. Frontiers in Robotics and AI, 10, 1285412.
[2] Jiang, C., & Guo, Y. (2020). Multi-robot guided policy search for learning decentralized swarm control. IEEE Control Systems Letters (L-CSS), 5(3), 743-748.
[1] Jiang, C., Chen, Z., & Guo, Y. (2019). Learning decentralized control policies for multi-robot formation. In 2019 IEEE/ASME International Conference on Advanced Intelligent Mechatronics (AIM), pp. 758-765.