NRI: FND: The Robotic Rehab Gym: Specialized Co-Robot Trainers Working with Multiple Human Trainees for Optimal Learning Outcomes, sponsored by NSF, 2020-2025
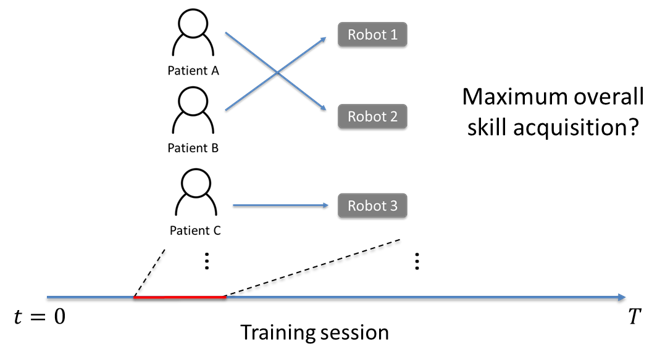
Multi-Patient Multi-Robot Task Assignment1. Multi-Patient Multi-Robot Task Assignment - Mathematical Optimization Approaches
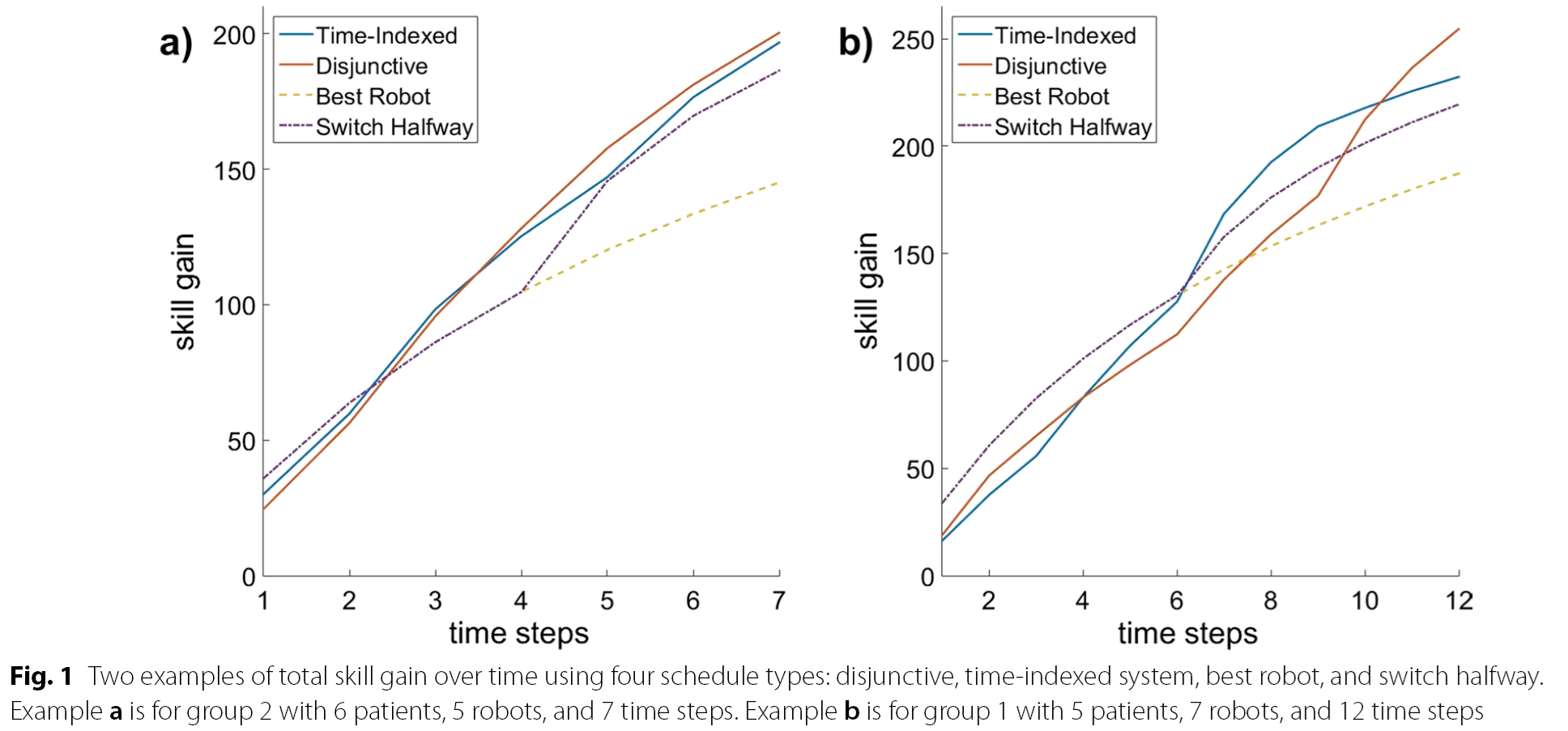
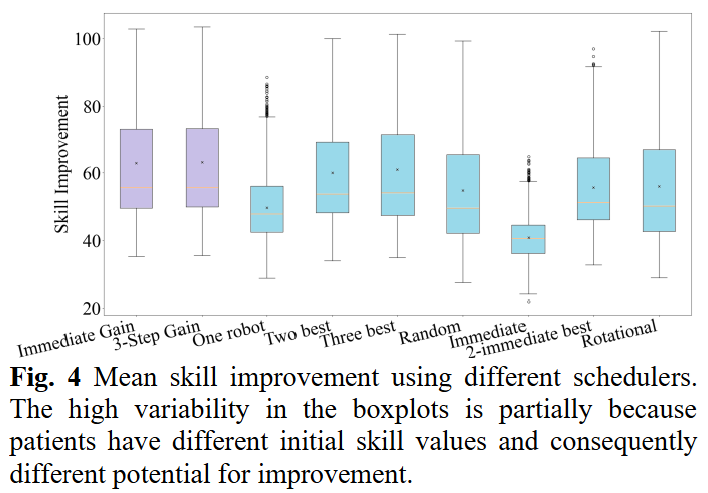
- Deterministic Optimization via Mixed Integer Nonlinear Programming (MINLP) [1]
- Addressing Stochasticity in Patient Skill Acquisition with Neural-Network-Based Prediction [2,3]
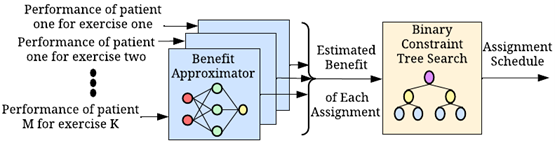
2. Multi-Patient Multi-Robot Task Assignment - Learning-Based Approaches
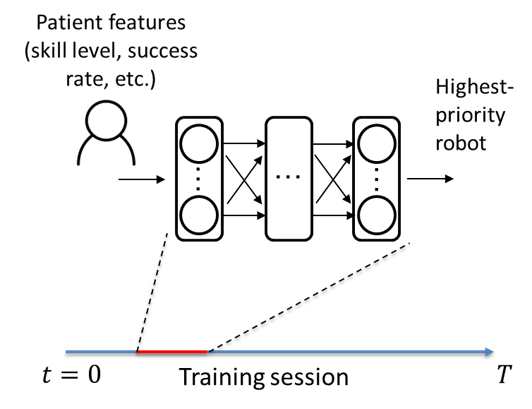
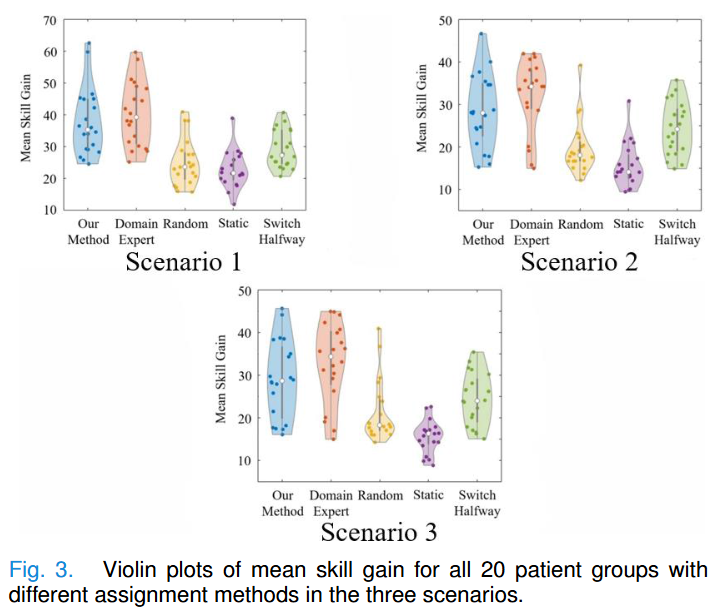
- Learning Computational Neural Network Models Imitating Experts' Patient-Robot Assignment Strategies [4,5,6]
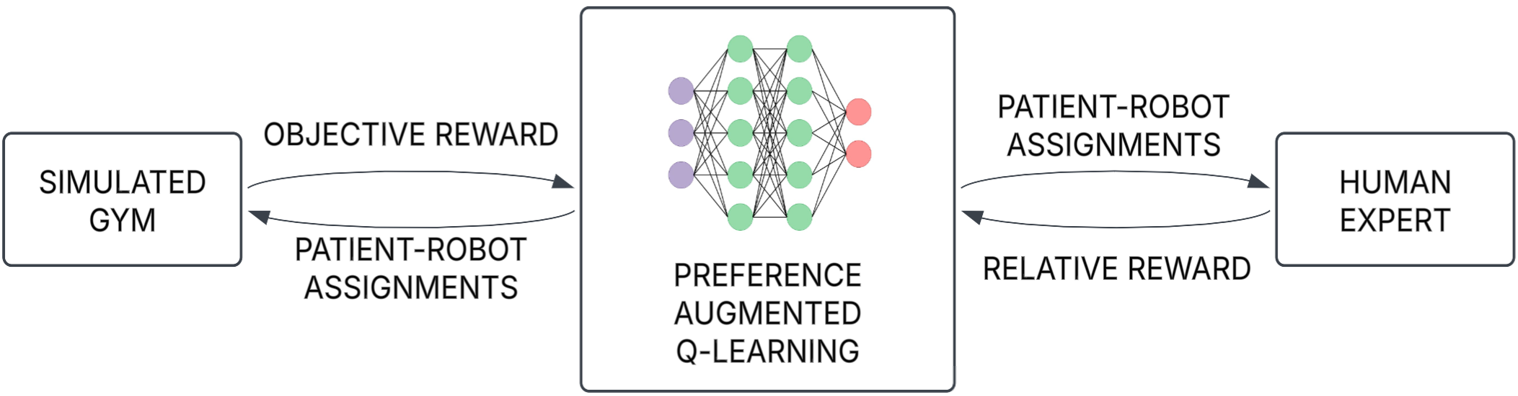
- Preference-Augmented Learning from Expert Feedback [7]
Publications:
- [7] Bharadwaj, V.R., Miller, B.A., Novak, V.D. and Jiang, C. (2025). Preference Augmented Q-Learning for Patient Exercise Scheduling in a Robotic Rehabilitation Gym, in 2025 IEEE International Conference on Rehabilitation Robotics (ICORR), pp. 603-608.
- [6] Bharadwaj, V.R., Miller, B.A., Novak, V.D. and Jiang, C. (2024). Learning Skill Training Schedules from Domain Experts in a Rehabilitation Gym Using Inverse Reinforcement Learning. In 2024 10th IEEE RAS/EMBS International Conference for Biomedical Robotics and Biomechatronics (BioRob), pp. 1815-1821.
- [5] Adhikari, B., Bharadwaj, V. R., Miller, B. A., Novak, V. D., & Jiang, C. (2023). Learning Skill Training Schedules From Domain Experts for a Multi-Patient Multi-Robot Rehabilitation Gym. IEEE Transactions on Neural Systems and Rehabilitation Engineering, 31, pp. 4256-4265.
- [4] Adhikari, B., Ranashing, S., Miller, B. A., Novak, V. D., & Jiang, C. (2022). Learning Dynamic Patient-Robot Task Assignment and Scheduling for A Robotic Rehabilitation Gym. In 2022 IEEE International Conference on Rehabilitation Robotics (ICORR), pp. 1-6.
- [3] Miller, B. A., Bharadwaj, V. R., Jiang, C. and Novak, V. D. (2025). Dynamic Patient-Robot Assignment in a Simulated Stochastic Robotic Rehabilitation Gym, IEEE Transactions on Medical Robotics and Bionics (T-MRB), 2025.
- [2] Miller, B. A., Adhikari, B., Jiang, C., & Novak, V. D. (2023). Automated patient-robot task assignment in a simulated stochastic rehabilitation gym. In 2023 IEEE International Conference on Rehabilitation Robotics (ICORR), pp. 1-6.
- [1] Miller, B. A., Adhikari, B., Jiang, C., & Novak, V. D. (2022). Automated patient-robot assignment for a robotic rehabilitation gym: a simplified simulation model. Journal of NeuroEngineering and Rehabilitation, 19(1), 126.